
Introduction
Passive suppression of low-frequency noise or vibration has numerous
disadvantages, mainly because of the volume of the absorbers. By the usage
of signal processors it has became possible to utilize different active
noise control methods. These are based on the phenomenon of the destructive
interference. A "secondary" noise has to be generated, which suppresses
the "primary" (i.e. the original) noise at the properly situated microphones.
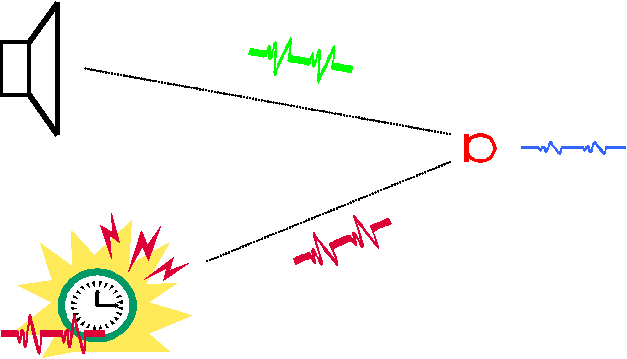
The whole problem has both acoustical and control aspects. In some cases, if the secondary source can be implemented near to the primary source (e.g. a ventilation duct), a single loudspeaker - microphone pair is enough. In other cases, if the noise source is not concentrated, and the suppression in an enclosure has to be achieved (e.g. an airplane), more loudspeakers and microphones are utilized.
Active noise control is a new research and development direction at
our department. However, the knowledge-base in measurement, system identification
and signal processing helps us to obtain new results in this field.
Technical Background
Active noise control requires multifarious knowledge, such as measurement,
analog and digital signal processing and acoustics. Design of active noise
control systems needs measurements on the plant to be controlled.
The records derived during the measurements play an essential role in plant
identification and system simulation. Algorithm design and evaluation
has a central role. It should be in close ties with the other parts of
the design process. The main task is to implement or improve digital signal
processing methods can be used for this purpose. Although the design needs
the first measurement results, involving the a priori knowledge in the
field (literature, experiences) the work on this task can be started at
the beginning of the design. This task includes theoretical derivations,
simulations and laboratory experiments. Due to the special features (e.g.
high temperature) of the possible acoustic systems, the active noise control
system needs special hardware tools. Sensor and actuator design is
an important part of the system design. The final part requires industrial
experiments giving feedback to the above parts of the design. This
experimental phase is also for revealing the scope of active noise control
for the actual purpose.
An acoustic transfer function
Research activities
Conventional noise controllers are usually adaptive filters, with the
parameters updated mainly on LMS basis. The first systems for this task
were feedback systems. The most successful applications of them are single
channel systems in which the loudspeaker is closely positioned to the error
microphone (e.g. an ear defender). The next step was the implementation
of feedforward controllers. These systems need an additional reference
signal which is correlated with the primary noise. Feedforward control
was successfully implemented in various active noise systems. Such adaptive
systems utilize the filtered-X LMS (XLMS) algorithm, therefore they need
a built-in model on the acoustic path between the secondary source and
the microphone. The accuracy of this model influences the success of the
control. Adaptive systems are able to suppress both broadband and harmonic
noise.
Periodic noise control
If the noise to be suppressed is periodic, adaptive feedforward control
is straightforward, because of the easily available reference signal. This
control task is rather simple, therefore the controller should be simple,
as well. However, the structure of the usual adaptive controllers is similar
to that for broadband noise control. The aim of our first research work
was to design an adequate controller, which is fitted to periodic noise
cancelation providing simpler structure and better control results than
the conventional adaptive controllers.
The theoretical background of such a controller design is the adaptive
Fourier analysis. The adaptive Fourier analyzer (AFA) is a structurally
adaptive system for exact measurement of band-limited periodic signals
of arbitrary fundamental frequency. It is an extension of the resonator
based observers developed earlier to perform the recursive discrete Fourier
transform (RDFT). In these observers the resonators work in a common feedback
loop providing zero steady-state feedback error at the resonator frequencies.
The AFA adapts the resonator frequencies to coincide with those in the
input signal. The proposed noise controller can be considered as an extension
of the AFA.
Broadband noise control
The experience with periodic noise controller design helped us to extend the ideas to the field of broadband noise control. In the scope of the research is the convergence of the LMS based adaptive filter structure.
Adaptive filters updated by the least mean square (LMS) algorithm are successfully utilized for both identification and control purposes in active noise control systems. In the case of noise control, the output of the adaptive filter drives the secondary loudspeaker, and the error signal is derived by the microphone only at the end of the secondary path. In such cases the filtered reference LMS (XLMS) algorithm guarantees the stable adaptation. Multiple channel systems utilize the multiple error LMS algorithm. However, the convergence of these algorithms can be very slow, depending on the transfer function of the secondary path. We have introduced a novel algorithm which provides much higher convergence rate than the XLMS algorithm. The proposed structure is a modification of the XLMS structure: in addition to the filter in the reference signal path, a secondary filter is applied, and the same filter is applied in the error signal path. This secondary filter is designed so that the resulted magnitude response in the adaptation loop oscillates around the unity. The proposed algorithm was extended also for mutiple channel active noise control. Numerical and practical examples verify that the proposed method improves the convergence rate significantly without high additional computational demand.
Development activities
Active noise control for industrial phones
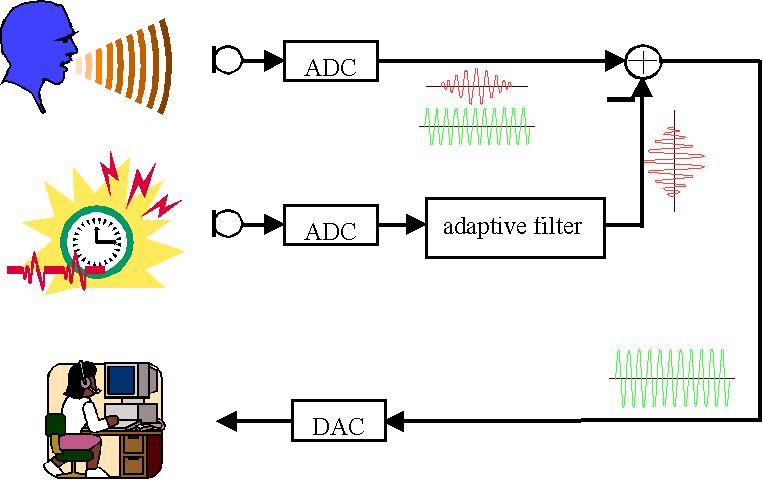
It is often unavoidable that phones in a factory work in a very noisy environment. Noise of different machines and equipment is also transmitted in the phone line. There are passive methods to suppress this noise, but they cannot solve the problem. Active noise control is a possibility for efficient noise suppression, even if the spectra of the speech and the noise are overlapped in the frequency domain. The solution is depicted in the figure below.
Active noise control for airplanes
Propeller-driven airplanes generate a high-level noise which is disturbing
for the passengers. The problem was posed by the airplane manufacturer
Fokker, and the experiments were made at the Technische Physische Dienst
in Delft, the Netherlands. Unfortunately, the successful experiments were
interrupted because of the breakdown of Fokker.
The structure for periodic noise control mentioned above was tested
in a laboratory environment. The main characteristics of the system were
the following:
 |
|
Active noise control for furnaces
The aim is development of active control systems which suppress the
noise appearing in furnaces and boiler rooms. The noise generated by the
combustion chamber of the furnace has different injurious influences: in
extreme situations it can destroy the equipment, but even at normal conditions
the noise is harmful for the personnel working in the boiler room. The
noise leaving the boiler room is a heavy environmental load. Conventional
methods of suppressing this noise using sound absorbers generally do not
work well at such circumstances. On the one hand, the power of this noise
is concentrated in the low-frequency range (below 500 Hz), on the other
hand traditional noise absorbers cannot be installed on furnaces. Active
cancelation of the furnace-noise seems to be a promising solution. This
project is granted by the Hungarian Fund for Scientific Research OTKA T-023868.
Related publications
Thesis
Active cancelation of periodic disturbances, PhD Thesis (in Hungarian), Technical University of Budapest, Budapest, Hungary 1997, 95 pages
Papers in periodicals
L. Sujbert, F. Nagy, “AFA based periodic noise cancelation”, Periodica Polytechnica Ser. Electrical Engineering, vol. 40, No.1, pp. 3-10. 1996.
L. Sujbert, G. Péceli, “Active noise control - simulation in MATLAB”, Periodica Polytechnica Ser. Electrical Engineering, vol. 40, No.1, pp. 11-24. 1996.
L. Sujbert, G. Péceli, “Signal model based periodic noise controller design”, Measurement - the Journal of the International Measurement Confederation IMEKO, vol. 20, No. 2, pp. 135-141.
Papers in conference proceedings
L. Sujbert, D. Dunay, “Resonator based acoustic noise cancelation”, presented on the 30th International Acoustics Conference, June 6-8, 1995, Zilina, Slovakia, in proceedings pages 133-138.
L. Sujbert, G. Péceli, “Periodic noise control - an observer approach”, presented on the 8-th IMEKO TC-4 Symposium, Sept. 16-17, 1996, Budapest, Hungary, in proceedings pages 184-187.
L. Sujbert, G. Péceli, “Noise cancelation using resonator based controller”, presented on the Active '97 – The International EAA Symposium on Active Control of Sound and Vibration, Aug. 21-23, 1997, Budapest, Hungary, in proceedings pages 905-916.
L. Sujbert, “A filtered reference - filtered error LMS algorithm”, presented on the IEEE International Workshop on Intelligent Signal Processing, Sept. 4-7, 1999, Budapest, Hungary, in proceedings pages 204-209.
L. Sujbert, “A new filtered LMS algorithm for active noise control”, presented on the Active '99 - The International EAA Symposium on Active Control of Sound and Vibration, Dec. 2-4, 1999, Fort Lauderdale, Florida, USA, in proceedings pages 1101-1110.
Technical report
L. Sujbert, R. Dunay, “Resonator based periodic noise cancelation'”, Technical report (TPD-HAG-RPT-0044), 1995, TPD-TNO, Delft, the Netherlands.